Simon-Steinmann-nested-Transform-fix#78
Conversation
|
@Simon-Steinmann have you tested this with translated collision objects only or also with rotated collision objects? |
|
@jgueldenstein looking at the code, it should include the translation and rotation. Make sure you have the absolute newest version of urdf2webots installed. There have been many updates last year. |
|
@Simon-Steinmann Thank you for your quick response, I had some issues when I worked on it in November (I am not sure if I used the newest version back then to be honest). I can't reproduce these issues and it seems to be working correctly. All bounding boxes are calculated correctly. Sorry to bother you. |
|
@Simon-Steinmann I was able to reproduce the issue, it occurs when there are multiple collision models in a single link. I have a solution that works for this case but I would need to test further if it breaks other cases. |
|
@jgueldenstein And these multiple collision models have different translations and rotations? Maybe you can share your urdf file. |
|
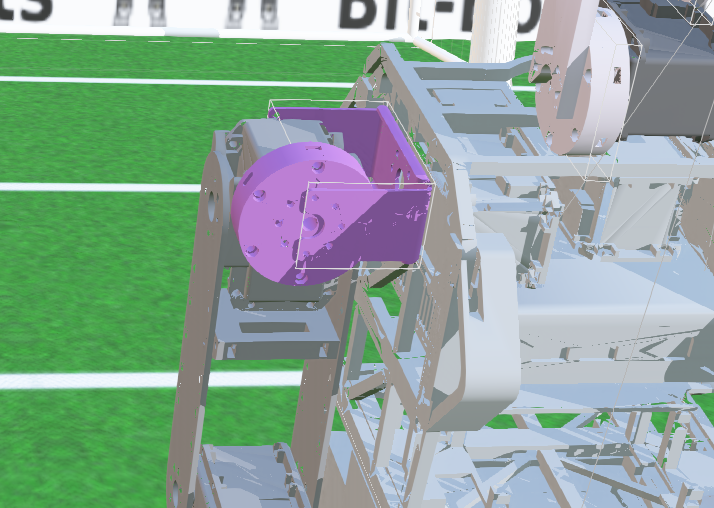
@Simon-Steinmann Surely: https://github.com/bit-bots/wolfgang_robot/blob/f4e18ccf2e2b6596a13cead013e56b54c89f3361/wolfgang_description/urdf/robot.urdf An example link with multiple collision models that is probably easier to talk about than the torso link (~40 collision models) is this: https://github.com/bit-bots/wolfgang_robot/blob/f4e18ccf2e2b6596a13cead013e56b54c89f3361/wolfgang_description/urdf/robot.urdf#L327 When running the urdf conversion script: I get the following result in the simulator The only Bounding box that is drawn correctly is the one around the "shoulder_connector.stl" which has a rotation of basically zero And the corresponding part in the proto file: Webots also displays the following info: |
|
The nested transforms seem wrong. Seems only to affect meshes. |
|
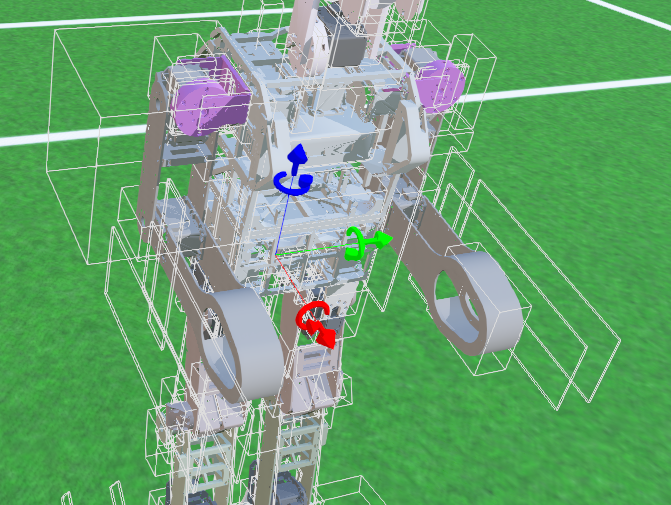
Try changing line 186 of writeProto.py to |
|
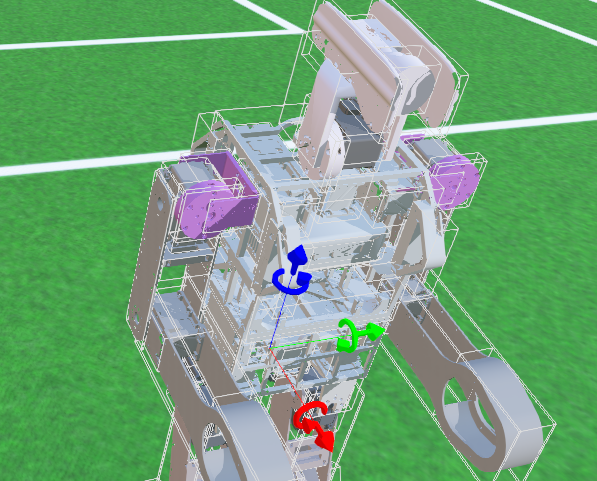
When only changing this line, the bounding boxes are generated but incorrectly as seen here I have a solution where I also applied this but also adapted the calculations for the bounding boxes. The bounding boxes seem to be calculated correctly: |
|
@Simon-Steinmann i have put this in a new issue for further discussion. |
Fixes the issue detailed in #77