The objective of this project is to create a lane lines detection algorithm using Python and computer vision techniques. It is part of the Complete Self Driving Car Course - Applied Deep Learning, and much of the code is leveraged from the lecture notes.

For this project, the following resources were used:
- Python 3.8.5 - Latest Python version by the time the project was created
- Numpy 1.18.5
- OpenCV 4.3.0
- A video recording of a vehicle moving in a lane street The video used on the project was filmed by me in my hometown (Belo Horizonte - Brazil). In my conception, it was a interesting one because it contained not only straight and cropped lanes, but it also had shadows from the trees and a little change of the perspective due to a soft uphill on the streed (that makes the lanes look a little more separeted from each other), wich made the line detection a little bit more difficult. The raw video can be downloaded here.
In OpenCV, in order to display the video file, it is needed to create a Video Capture Object and then create a loop to decode and show every video frame
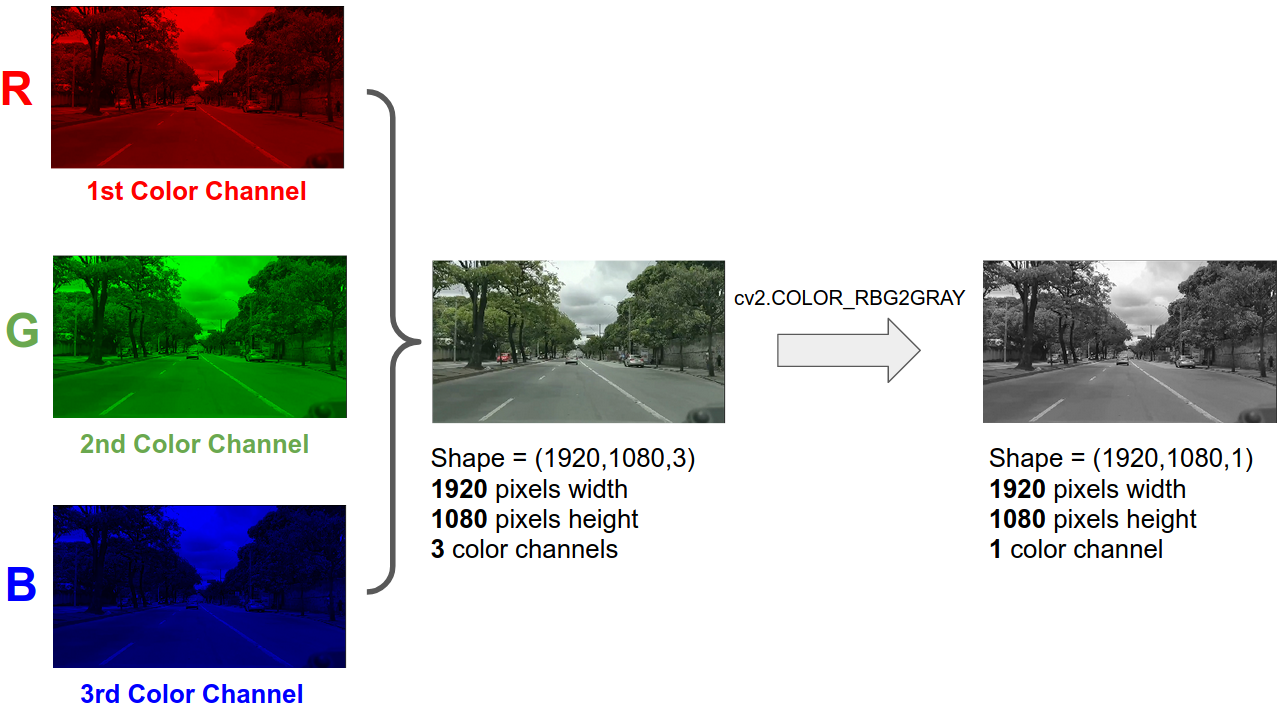
RGB Color images have, as the name suggests, 3 color channels (Reg, Green, Blue). Before applying the Canny Filter, one technique applyed to use less computational power, is to transform the 3-Color-Channel RGB image into a 1-Color-Channel Grayscale image.

When applying the Canny Filter for edge detection, it is easily affected by noise and, to reduce this noise and make the image smoother, we apply a Blur